◄ Treść dostępna po zalogowaniu. ►
Trwa zbiórka darowizn na utrzymanie serwisu, więcej informacji po prawej stronie..


W marcu zebraliśmy:
Szybka wpłata anonim.
z czego cała reszta czytelników spoza grupy VIP: 0.0%


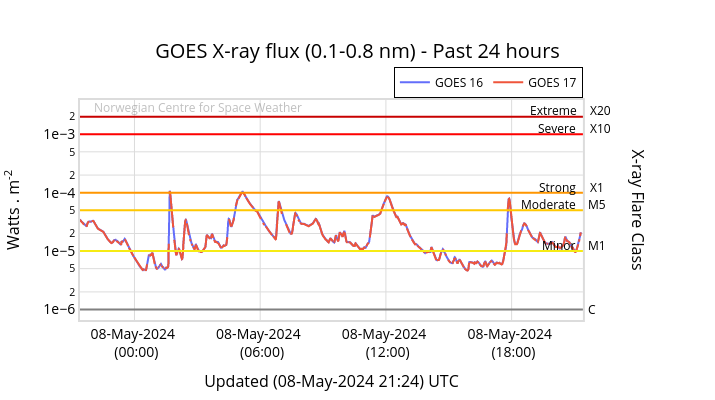
 Słońce On-Line
Słońce On-Line
 Ostrzeżenia meteorologiczne i hydrologiczne oraz p...
Ostrzeżenia meteorologiczne i hydrologiczne oraz p...
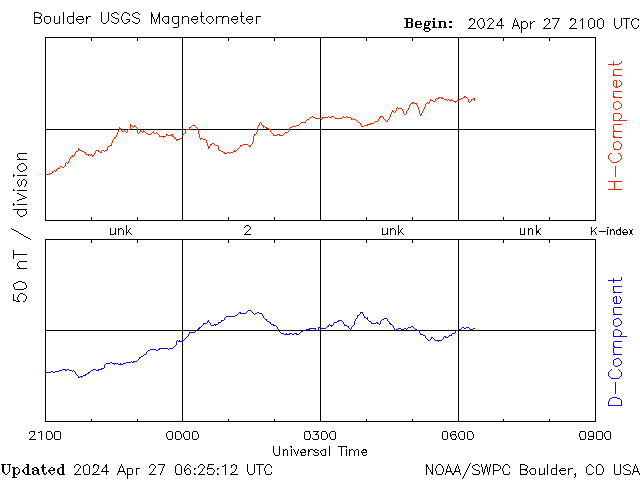
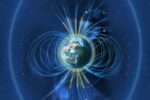
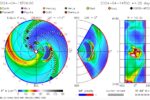
 Geomagnetyzm Ziemi
Geomagnetyzm Ziemi
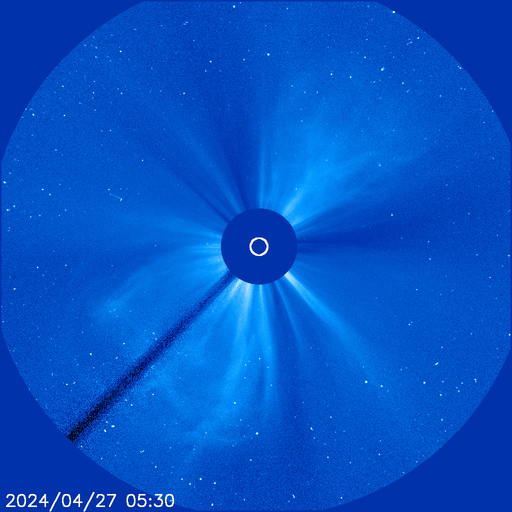
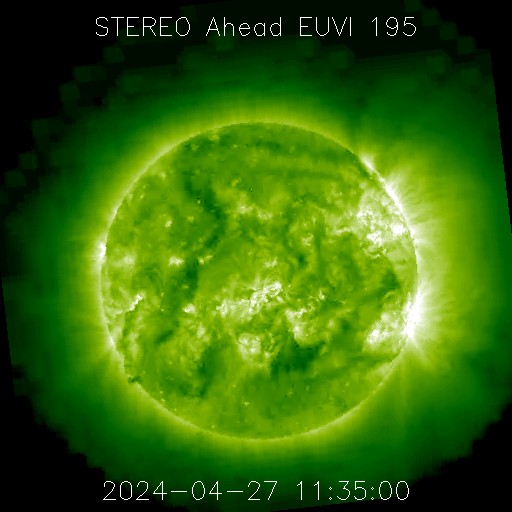
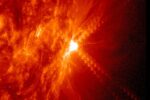
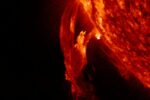 Słońce – Duży wyrzut plazmy na wschodzie
Słońce – Duży wyrzut plazmy na wschodzie
 USA – Trzęsienie ziemi o magnitudzie 4.8 w p...
USA – Trzęsienie ziemi o magnitudzie 4.8 w p...
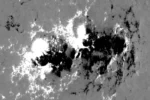 Słońce – Magnetogram ogromnej plamy 3615 z o...
Słońce – Magnetogram ogromnej plamy 3615 z o...
 Słońce – Średniej siły strefa magnetyczna wystąpi...
Słońce – Średniej siły strefa magnetyczna wystąpi...
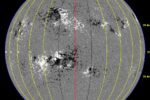 Słońce – Groźne plamy na wprost Ziemi, spod...
Słońce – Groźne plamy na wprost Ziemi, spod...
 Niezwykła natura
Niezwykła natura
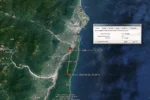
 Hualien, Tajwan – Wystąpiło największe od 25...
Hualien, Tajwan – Wystąpiło największe od 25...
 Słońce – Bardzo silny rozbłysk klasy M5.5 na...
Słońce – Bardzo silny rozbłysk klasy M5.5 na...
 Słońce – Trzy bardzo silne rozbłyski klasy M...
Słońce – Trzy bardzo silne rozbłyski klasy M...
 Instytut Maxa Plancka opracował urządzenie do wykr...
Instytut Maxa Plancka opracował urządzenie do wykr...
 Tajwan – Silne trzęsienie ziemi w Hualien sp...
Tajwan – Silne trzęsienie ziemi w Hualien sp...
 Średniej siły oddziaływania magnetyczne wystąpią 6...
Średniej siły oddziaływania magnetyczne wystąpią 6...
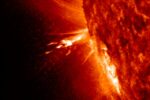
 Dwa duże wyrzuty plazmy ze Słońca na dalekim wscho...
Dwa duże wyrzuty plazmy ze Słońca na dalekim wscho...
 Polska – Rząd będzie walczył ze śmieciami za...
Polska – Rząd będzie walczył ze śmieciami za...
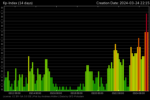 Burza geomagnetyczna osiągnęła w niedzielę poziom...
Burza geomagnetyczna osiągnęła w niedzielę poziom...
 =Dział pomiarów=
=Dział pomiarów=
 Słońce – W kierunku Ziemi poleciała plazma z...
Słońce – W kierunku Ziemi poleciała plazma z...
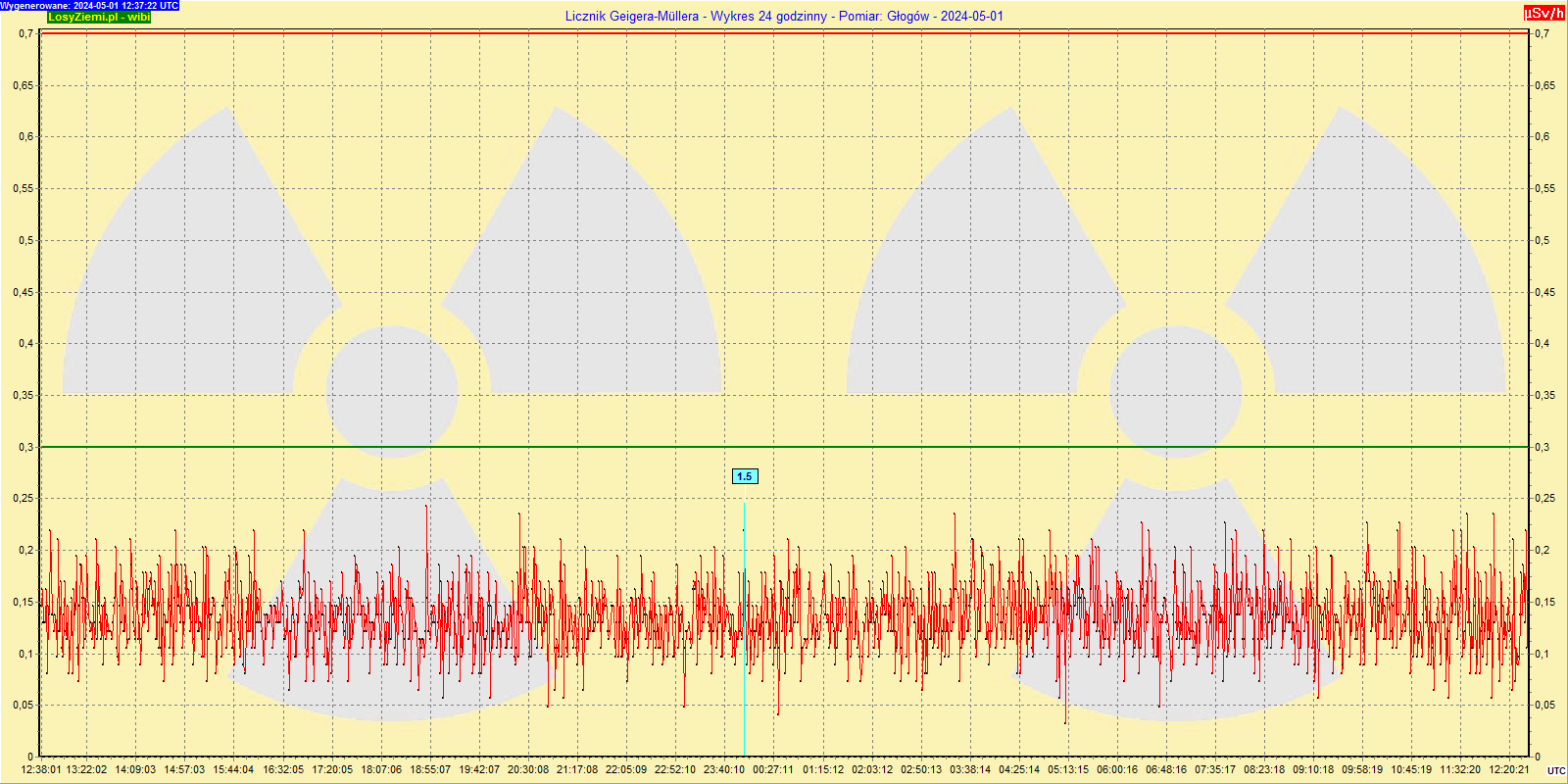
 Licznik Geigera-Müllera – Stały pomiar promi...
Licznik Geigera-Müllera – Stały pomiar promi...
 Słońce – Groźne plamy zbliżają się od wschod...
Słońce – Groźne plamy zbliżają się od wschod...